






























How does LiDAR work?

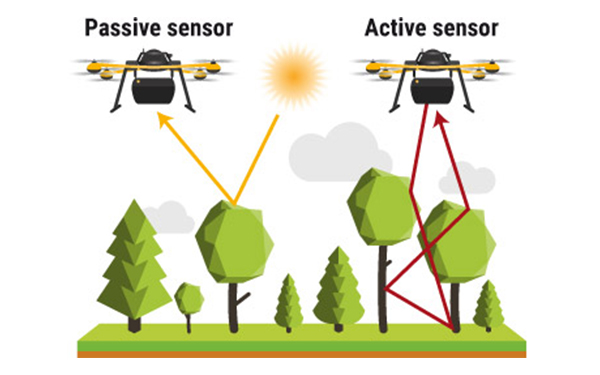
What is this laser technology making mapping possible through vegetation, in low-contrast or shadowy situations?
LiDAR: Light Detection and Ranging
Light Detection And Ranging (LiDAR) is a laser-based remote sensing technology. The idea behind LiDAR is quite simple: point a small laser at a surface and measure the time it takes the laser to return to its source.
This technology is used in geographical information systems (GIS) to produce a digital elevation model (DEM) or a digital terrain model (DTM) for 3D mapping.
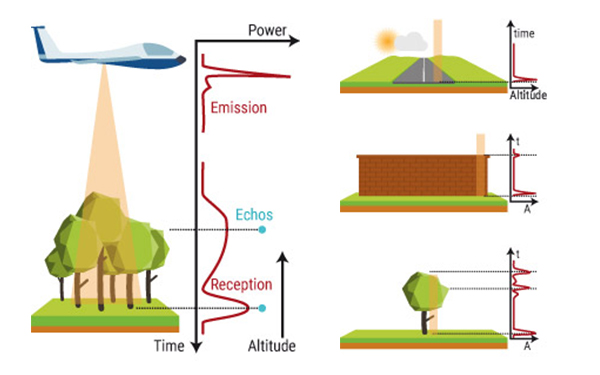
LiDAR scanning operating principle
- Emission of a laser pulse
- Record of the backscattered signal (return)
- Distance measurements (Time of travel x speed of light)
- Retrieving plane position and altitude
- Computation of precise echo position
LiDAR for drones matches perfectly with:
- Small areas to fly over (<10 sq. km or 100 km linear)
- Mapping under vegetation
- Hard-to-access zones
- Data needed in near real-time or frequently
- Accuracy range required between 2.5 and 10 cm
How does LiDAR work?
You may have already heard about LiDAR but have no clue about this technology. You’ll learn in what follows the basic principles behind LiDAR. You’ll also discover several applications for 3D laser mapping with unmanned aerial vehicles (also known as UAV, UAS or drones).
Understanding how LiDAR works
Light Detection and Ranging (LiDAR) is a technology similar to radar, using laser instead of radio waves.
LiDAR principle is pretty easy to understand:
- it emits a laser pulse on a surface
- catches the reflected laser back to the LiDAR pulse source with sensors
- measures the time laser travelled
- calculates the distance from source with the formula “Distance = (Speed of light x Time elapsed) / 2
This process is repeated a million times by LiDAR instruments and ends up producing a complex map of the surveyed area known as a 3D point cloud.
Understanding how a LiDAR system is built
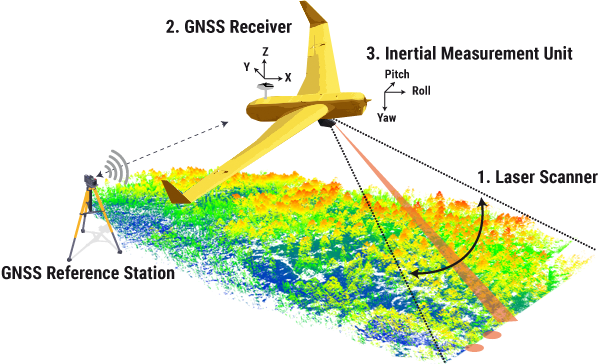
The equipment needed to measure a million distances from sensors to surface points is a LiDAR system. This advanced technology operates really fast as it is able to calculate the distance between LiDAR sensors and its target (as a reminder light speed is 300 000 kilometers per second). LiDAR systems integrate 3 main components whether they are mounted on automotive vehicles, aircraft or UAV:
Laser Scanner
LiDAR systems pulse a laser light from various mobile systems (automobiles, airplanes, drones…) through air and vegetation (aerial Laser) and even water (bathymetric Laser). A scanner receives the light back (echoes), measuring distances and angles. The scanning speed influences the number of points and echoes that are measured by a LiDAR system. The choice of optic and scanner influences greatly the resolution and the range in which you can operate the LiDAR system.
Navigation and positioning systems
Whether a LiDAR sensor is mounted on aircraft, car or UAS (unmanned aerial systems), it is crucial to determine the absolute position and orientation of the sensor to make sure data captured are useable data. Global Navigation Satellite Systems (GNSS) provide accurate geographical information regarding the position of the sensor (latitude, longitude, height) and an Inertial Measurements Unit (IMU) defines at this location the precise orientation of the sensor (pitch, roll, yaw). Data recorded by these 2 devices are then used to generate data into static points : the basis of the 3D mapping point cloud.
Computing technology
In order to make the most of the data : computation is required to make the LiDAR system work by defining precise echo position. It is required for on-flight data visualization or data post-processing as well to increase precision and accuracy delivered in the 3D mapping point cloud.
Defining a fit between your project needs and LiDAR specifications
- Laser Scanner: What is the level of accuracy, level of precision, point density, range, swath that fit to your project needs ?
- GNSS: Are the GNSS reference station (terrestrial) + GNSS receiver (moving) compatible with GNSS used (GPS, GLONASS, BEiDOU or Galileo) ? Do I need a ground station or not ?
- Batteries: Are the batteries internal or external ? What is the autonomy required to cover the surface you want to map ?
- Mounting: Can the LiDAR system be easily mounted on the aerial / airborne platform (drone, aircraft) or automotive platform (driving car) you use?
- Datafile: What is the format of the generated data file ? For example, YellowScan LiDAR models associated with CloudStation software can be used to export point clouds as .LAZ or .LAS files, as well as digital terrain or elevation models.
- Data Post-processing: How easy is to use the data and deliver the best 3D mapping point cloud to your end customer ? Classification, colorization using additional high resolution camera, DTM generation, orl ? What to do with the post-processed data ?
Discovering UAV LiDAR applications
Energies & Utilities: powerline survey to detect line sagging issues or to plan trimming activities
Mining: surface/volume calculation to optimize mine operations (stockpile, excavation) or decide mine extension
Construction & engineering: mapping to help leveling, planning and infrastructure optimization (roads, railways, bridges, pipelines, golf courses) or renovating after natural disasters, beach erosion survey to build emergency plan
Archaeology: mapping through the forest canopy to speed up discoveries and objects
Forestry: mapping forests to optimize activities or help tree counting
Environmental research: measuring growth speed, disease spreading
Discovering UAV for LiDAR mapping
Find out more about DJI UAV for LiDAR mapping such as DJI M600 or DJI M300.
Choosing the right UAV for your next LiDAR surveys is not easy. Read more about how to choose your UAV to start your LiDAR operations.
Discover what makes a good UAV LiDAR integration or some examples of integrations of our LiDAR models on drone or airborne platforms.
How does LiDAR work: FAQ
Can LiDAR scan through trees ?
LiDAR systems with multiple returns and higher pulse rates can help mitigate the impact of vegetation interference. Moreover, specialized processing techniques can be employed to filter out foliage and create more accurate ground elevation models. While LiDAR can provide valuable insights even in vegetated areas, the effectiveness depends on the specific conditions and technology used.
Can LiDAR be used to scan in the dark ?
Yes, LiDAR can be used to scan in the dark because it doesn’t rely on visible light like traditional camera. LiDAR systems emit their own laser pulses, which are then reflected off objects and returned to the sensor. The system measures the time it takes for the pulses to return, allowing it to create a detailed 3D map of the environment, regardless of the ambient light conditions.
This feature makes LiDAR particularly useful for applications such as autonomous driving vehicles, surveillance, and navigation in low-light or nighttime conditions. Also, LiDAR is increasingly being used in the consumer market, with Apple’s iPhone being a good example. Integrating LiDAR technology into the iPhone’s camera means, among other things, faster, more accurate autofocusing, particularly in low-light conditions. This information helps to deliver sharp, focused images, even in difficult lighting situations.
How does LiDAR detect objects ?
LiDAR detects objects by emitting rapid laser pulses and using sensors to measure the time it takes for those pulses to bounce back after hitting surfaces. The system calculates the distance based on the time delay, creating a point cloud that represents the object ‘s shape and position in 3D space. This enables accurate object detection and mapping in various applications like autonomous driving vehicles, environmental monitoring, and more. The point cloud can also be used to create a digital elevation model (DEM) or a digital terrain model (DTM).
Can LiDAR penetrate the ground ?
LiDAR can penetrate the ground to some extent, depending on the material and conditions. LiDAR’s ability to penetrate the ground is limited by factors such as the type and thickness of the material. For example, LiDAR can penetrate vegetation or even water, using bathymetric lasers to measure the depth of underwater surfaces. However, LiDAR cannot penetrate dense soil or rock. Ground-penetrating radar (GPR) is a different technology that is specifically designed to penetrate the ground and provide information about subsurface structures, but it operates on different principles compared to LiDAR scanning.
At what distance is LIDAR accurate ?
The accuracy of LiDAR can vary based on several factors, including the type of LiDAR system, the technology used, the quality of the equipment, and the specific application. Generally, LiDAR is known for its high accuracy in measuring distances, often achieving sub-centimeter to centimeter-level accuracy in favorable conditions.
For airborne LiDAR systems, which are commonly used for mapping large areas, the accuracy can be maintained even at longer distances. High-end airborne LiDAR systems can achieve accuracies of a few centimeters at distances ranging from tens to hundreds of meters.
It’s important to note that accuracy can be affected by factors like atmospheric conditions, the reflectivity of the surfaces being measured, and the quality of the LiDAR equipment. Calibration, data processing, and correction techniques on software also play a crucial role in achieving accurate results.