



















What are the different scan patterns of LiDAR systems?
Feb 05, 2021












You may know how a LiDAR system works – measuring the travel time between the emission of a laser pulse and the reception of the signal that is reflected by a target.
But have you ever wondered what kind of path the laser is scanning on the ground?
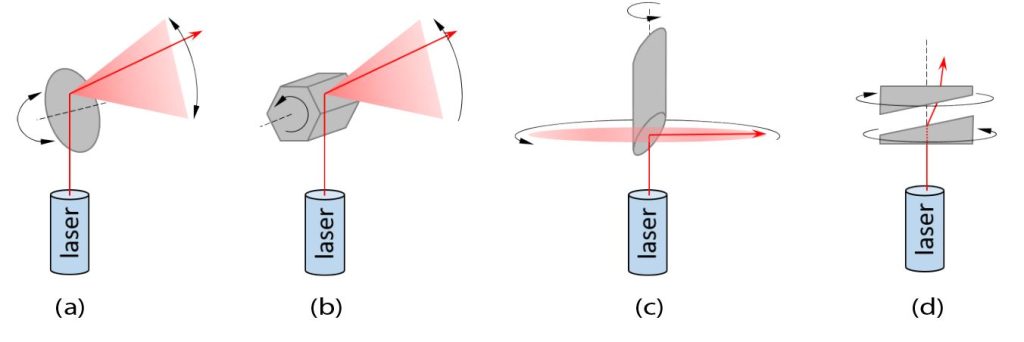
Laser scanners can be rotating or non-rotating, using different optical deflecting elements such as prisms, gratings and mirrors creating specific scan patterns.
The oscillating mirror (Figure 1.a)
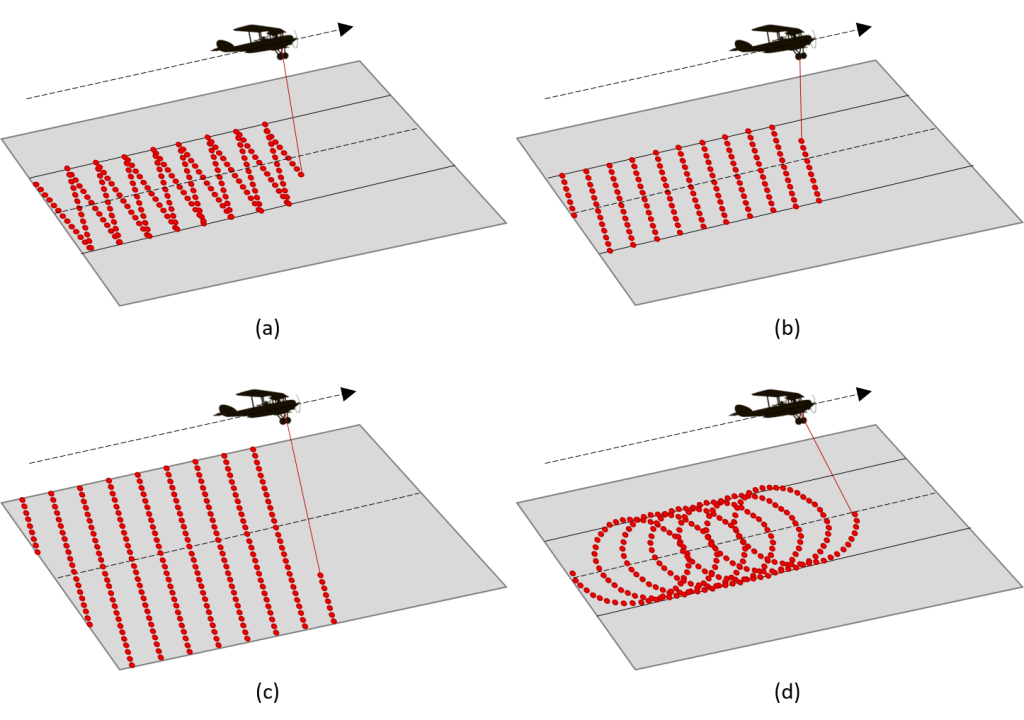
Lasers using oscillating mirrors direct the laser pulses in two directions of the swath, creating a jagged pattern on the ground (Figure 2.a). The swath width is given by the maximum angle of inclination of the mirror. The resulting point density is not uniform because the laser pulses tend to accumulate at the edges of the swath due to the deceleration of the mirror.
The rotating polygon mirror (Figure 1.b)
This system creates a scan pattern composed of parallel lines oblique to the direction of the platform’s progression (Figure 2.b). The scan here is always in the same direction. The swath is dependent on the width of the polygonal mirror face.
The rotating mirror (Figure 1.c)
With its axis of rotation collinear with the direction of the laser beam emitted by the source, the rotating mirror makes it possible to scan almost 360°. As in the previous example, the scanning pattern is composed of parallel lines oblique to the direction of the system’s motion (Figure 2.c). This time, the size of the swath is dependent on the maximum range of the LiDAR system.
The dispersive prisms or gratings (Figure 1.d)
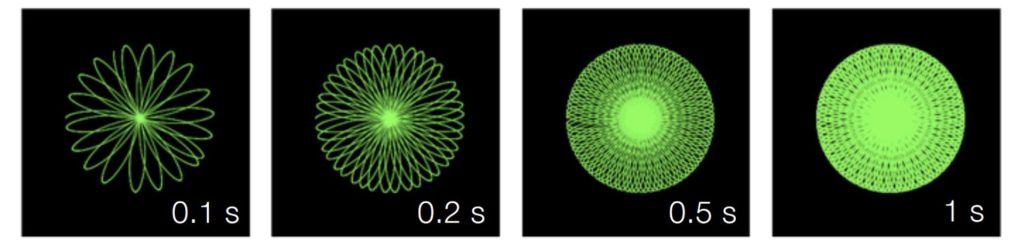
Dispersive prisms as well as dispersive gratings rotate around the same axis to generate roses-like scanning patterns. For instance, the Risley prisms – also called wedge prisms – can do circles (Figure 2.d) or roses-like scanning patterns (Figure 3).
The advantage of these patterns is that they do not repeat themselves so that even in static, the coverage rate increases over time which allows the detection of more details in the field of view of the sensor. The size of the swath depends on the configuration and inclination of each wedge prism.
N.B. Author Léa Moussy – The content of this article is protected by copyright.