






























LiDAR vs. RADAR

The difference between LiDAR (Light Detection And Ranging) and RADAR (Radio Detection And Ranging) is their wavelength.
Although the basic purpose of LiDAR and RADAR is the same – detecting the presence and volume of distant objects – it is essential to understand the difference between these two technologies.
Light Detection and Ranging (LiDAR) is a light-based remote sensing technology. In the case of Yellowscan, the idea behind LiDAR is quite simple: point a small infrared laser beam at a surface and measure the time it takes for the laser to return to its source. By having a LiDAR with a 360° viewing angle (using a rotating mirror for example), it is possible to obtain a point cloud of the environment. Then, a specific software makes a 3D image that reproduces the shape around the LiDAR with a precise position in space.
The RADAR system works in much the same way as LiDAR, with the big difference that it uses radio waves instead of laser or LED light. It transmits radio waves from a rotating or fixed antenna and measure the time of flight of the reflected signal.
The wavelength of RADAR is between 30 cm and 3 mm, while LiDAR has a micrometer range wavelength (Yellowscan LiDARs work at 903 and 905 nm).
What’s the differences between LiDAR and Radar
With its wavelength, the RADAR can detect objects at long distance and through fog or clouds. But its lateral resolution is limited by the size of the antenna. The resolution of standard RADAR is several meters at a distance of 100 meters.
LiDAR is a compact solution that enables a high level of accuracy for 3D mapping. At a distance of 100 meters, Yellowscan LiDAR systems have a resolution of a few centimeters.
This is why LiDAR is used for laser altimetry and contour mapping. Radar, on the other hand, is used for aircraft anti-collision systems, air traffic control or radar astronomy.
Radar Data
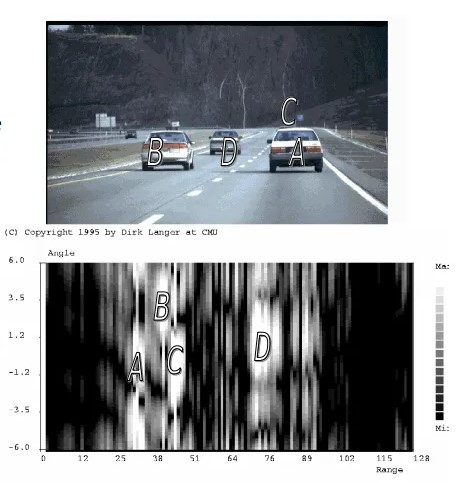
Data from a scanning radar. The top image is a video of the scene, and the bottom one is the radar data, with corresponding locations marked.
The brightness indicates the strength of return. Car A is close and in the center of the radar return (the video image does not extend as far to the right as the radar); B is further and left; C is a bit further and is barely visible above the roof of A; D is much further and has a bearing between A and B.

LiDAR Data
Data from Yellowscan UAS LiDAR. The image is a pointcloud generated with Yellowscan Vx-20 in Japan, from a 80m AGL flight.
The top image is colored by height with a shading effect (Eye Dome Lighting). Objects as fine as distribution wires are clearly identified.
The bottom image is colored by the RGB value taken from a camera synchronized to the LiDAR. Each LiDAR point is assigned to a color value taken from the orthomosaic. The rendering is an immersive 3D image.
LiDAR vs Radar: FAQ
Explore frequently asked questions on the distinctions and uses of LiDAR and Radar technologies:
What is the main difference between LiDAR and Radar?
The primary difference between LiDAR and Radar lies in their underlying technology. LiDAR uses laser beams to measure distances, while Radar relies on radio waves. This fundamental difference leads to variations in their applications and capabilities.
Where is LiDAR or Radar commonly used, and for what purposes?
LiDAR is used in fields like autonomous vehicles, forestry, archaeology, civil engineering or mining. It’s used for accurate 3D mapping, obstacle detection, and environmental monitoring, among other purposes.
Radar is extensively used in aviation, military, weather forecasting, and maritime navigation. Its ability to detect objects and measure their speed and direction makes it invaluable in these sectors.
Are there any similarities between LiDAR and Radar technologies?
Yes, there are similarities. Both LiDAR and Radar are remote sensing technologies used for object detection and ranging. They are essential tools in various industries, despite their differences.
Which technology is better suited for specific applications, LiDAR or Radar?
The choice between LiDAR and Radar depends on the specific application’s requirements. LiDAR excels in precise 3D mapping, while Radar is better for long-range detection and adverse weather conditions. Deciding which technology to use often involves considering factors like cost, accuracy, and environmental conditions. However, its accuracy is generally lower than LiDAR, typically measured in meters.
How does sonar technology work, and how does it differ from LiDAR and Radar?
Sonar technology operates on a completely different principle compared to LiDAR and Radar. Instead of using electromagnetic waves like Radar and laser beams like LiDAR, sonar relies on sound waves. A sonar system consists of sensors, called hydrophones, that transmit and receive sound waves underwater. When these sound waves encounter an object, they bounce back to the sensor, allowing it to calculate the distance and direction of the object. In summary, while LiDAR and Radar are based on an electromagnetic wave, Sonar uses a sound wave to detect objects underwater.
How do vision sensors in autonomous vehicles enhance driving safety and technology?
Vision sensors in autonomous vehicles, including cameras, LiDAR, radar, and ultrasonic sensors, are integral for safer and more efficient driving. These sensors capture data about the vehicle’s surroundings, allowing AI systems to recognize and respond to objects, pedestrians, and road conditions. Tesla and other autonomous vehicle manufacturers are using these technologies and will continue to develop them, contributing to safer and more advanced autonomous driving solutions.
Conclusion:
In summary, the comparison of LiDAR and Radar reinforces the fundamental technological disparities between these two sensing methods. LiDAR operates by emitting laser pulses and measuring the time it takes for them to bounce back, providing precise distance and detailed 3D maps. On the other hand, Radar relies on radio waves to detect objects and measure their speed and distance, excelling in long-range detection and adverse weather conditions.
These technological distinctions determine the respective applications and strengths of LiDAR and Radar. While LiDAR is preferred for tasks requiring meticulous mapping and object recognition, Radar’s reliability in various environmental conditions makes it indispensable in fields such as aviation and maritime operations. Understanding these technological nuances is key to selecting the most suitable sensing method for specific applications, ensuring optimal performance and outcomes.
Interested in LiDAR mapping with drones? Read our full article on Everything you need to know about LiDARs on UAVs
N.B: Author Léa Moussy. The content of this article is protected by copyright.